First I would like to thank Conor Peterson for the Code to read ADNS 2610 that I have adapted by deleteing a lot of it.
conorpeterson.wordpress.com optical-mouse-hacking
And Tim for a circuit diagram etc to get the Chip working.
Outguessing The Machine
And Also Mr Faciens
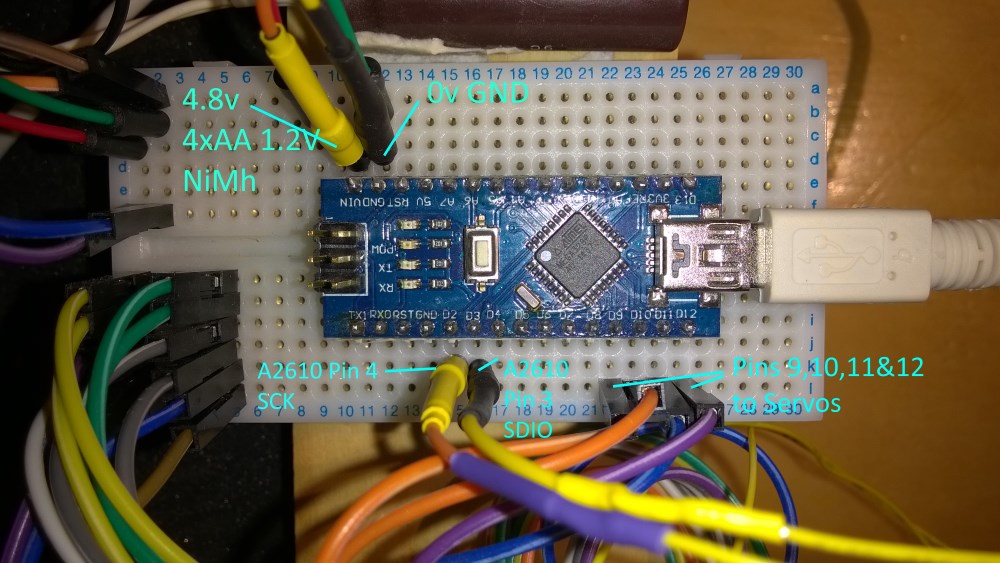
HomoFaciens Motion detection with a computer mouse and an Arduino Uno
The A2610 Optial mouse Chip available on ebay.







//// Camera pinMode(SCLK, OUTPUT); pinMode(SDIO, OUTPUT); /// Serial comms Serial.begin(38400); Serial.println("Serial established."); Serial.flush();
mouseInit(); dumpDiag();}
void loop() { if ((xPix == -1) && (yPix == -1)) { if (seeNothing++ > 3) mode = 0; } else seeNothing == 0; switch (mode) { case 0 : // search sweep area PosReached = 0; PosCount = 0; while (true) { PosReached = 0; for (int i = 0; i < 4 ; i++ ) { //adjust servo positions // we move the servos in small steps and the delay(20) makes arm motion smooth and slow if ( PosArm[i] > ArmPos[PosCount][i]) PosArm[i] = PosArm[i] - 1; // if actual position is greater than requird position reduce position by 1 if ( PosArm[i] < ArmPos[PosCount][i]) PosArm[i] = PosArm[i] + 1; // if actual position is less than required position value increase position valuue by 1 if ( PosArm[i] == ArmPos[PosCount][i]) PosReached++; // check if servo has reached required position/angle } if (PosReached == 4) PosCount++; // if all 4 servos have reached position then increase array index (PosCount)to next position in array
if (PosCount == PosCountMax) PosCount = 0; // if end of array reached reset index to 0 and repeat. MoveArm(); // call method readFrame(frame); if ((xPix > -1) && (yPix > -1)) { mode = 1; break; } } break; case (1): // something seen zero in if (PosArm[1] < 20) { e = 4; h = 44; } if ((PosArm[1] > 19) && (PosArm[1] < 40)) { e = 5; h = 46; } if ((PosArm[1] > 39) && (PosArm[1] < 45)) { e = 5; h = 47; } if ((PosArm[1] > 44) && (PosArm[1] < 53)) { e = 6; h = 50; } if (PosArm[1] > 52) { e = 7; h = 52; } readFrame(frame); if ((yPix > e - 2) && (yPix < e + 2)) { PosArm[2] += 1; if (PosArm[2] > h) PosArm[2] = h; if (PosArm[2] < 10) PosArm[2] = 11; MoveArm(); // call method if ((PosArm[2] == h) && (yPix == e)) { mode = 2; break; } } if (xPix > 8) xD = -1; if (xPix < 8) xD = 1; if (yPix > e) yD = -1; if (yPix < e) yD = 1; PosArm[3] -= xD; if (PosArm[3] < 70) PosArm[3] = 71; if (PosArm[3] > 120) PosArm[3] = 119; PosArm[1] -= yD; if (PosArm[1] < 10) PosArm[1] = 11; if (PosArm[1] > 101) PosArm[1] = 100; MoveArm(); // call method break; case (2): //close grip if ( PosArm[0] > 88) PosArm[0] = PosArm[0] - 1; if ( PosArm[0] < 88 ) PosArm[0] = PosArm[0] + 1; if ( PosArm[0] == 88) mode = 3; MoveArm(); delay(10); break; case (3): //Lift Arm if ( PosArm[2] > 25) PosArm[2] = PosArm[2] - 1; if ( PosArm[2] < 25 ) PosArm[2] = PosArm[2] + 1; if ( PosArm[2] == 25) mode = 4; MoveArm(); delay(10); break; case (4): // carry marble to drop zone PosCount = 9; PosReached = 0; while (true) { PosReached = 0; for (int i = 0; i < 4 ; i++ ) { //adjust servo positions // we move the servos in small steps and the delay(20) makes arm motion smooth and slow if ( PosArm[i] > ArmPos[PosCount][i]) PosArm[i] = PosArm[i] - 1; // if actual position is greater than requird position reduce position by 1 if ( PosArm[i] < ArmPos[PosCount][i]) PosArm[i] = PosArm[i] + 1; // if actual position is less than required position value increase position valuue by 1 if ( PosArm[i] == ArmPos[PosCount][i]) PosReached++; // check if servo has reached required position/angle } if (PosReached == 4) { // if all 4 servos have reached position then increase array index (PosCount)to next position in array mode = 5; break; } MoveArm(); delay(10); } delay(1500); break; case (5): //open grip if ( PosArm[0] > 120) PosArm[0] = PosArm[0] - 1; if ( PosArm[0] < 120 ) PosArm[0] = PosArm[0] + 1; if ( PosArm[0] == 120) mode = 0; // grip opened return to mode 0 search mode MoveArm(); delay(10); break; }}///////////////////////////////////////Armvoid MoveArm() { // write arm position data to servos for (int i = 0 ; i < 4 ; i++) { if (PosArm[i] < 10) PosArm[i] = 5; // limit servo movement to prevent hitting end stops if (PosArm[i] > 170) PosArm[i] = 175; // servo.write limited 5 - 175 } Arm0Servo.write(PosArm[0]); Arm1Servo.write(PosArm[1]); Arm2Servo.write(PosArm[2]); Arm3Servo.write(PosArm[3]);}///////////////////////////////////////Camera// adapted from https://conorpeterson.wordpress.com/2010/06/04/optical-mouse-hacking-part-1/void mouseInit(void){ digitalWrite(SCLK, HIGH); delayMicroseconds(5); digitalWrite(SCLK, LOW); delayMicroseconds(1); digitalWrite(SCLK, HIGH); delay(1025); writeRegister(regConfig, maskNoSleep); //Force the mouse to be always on.}
void dumpDiag(void){ unsigned int val;
val = readRegister(regStatus); /* Serial.print("Product ID: "); Serial.println( (unsigned int)((val & maskPID) >> 5)); Serial.println("Ready."); */ Serial.flush();}void writeRegister(byte addr, byte data){ byte i; addr |= 0x80; //Setting MSB high indicates a write operation. //Write the address pinMode (SDIO, OUTPUT); for (i = 8; i != 0; i--) { digitalWrite (SCLK, LOW); digitalWrite (SDIO, addr & (1 << (i - 1) )); digitalWrite (SCLK, HIGH); }
//Write the data for (i = 8; i != 0; i--) { digitalWrite (SCLK, LOW); digitalWrite (SDIO, data & (1 << (i - 1) )); digitalWrite (SCLK, HIGH); }}
byte readRegister(byte addr){ byte i; byte r = 0;
//Write the address pinMode (SDIO, OUTPUT); for (i = 8; i != 0; i--) { digitalWrite (SCLK, LOW); digitalWrite (SDIO, addr & (1 << (i - 1) )); digitalWrite (SCLK, HIGH); }
pinMode (SDIO, INPUT); //Switch the dataline from output to input delayMicroseconds(110); //Wait (per the datasheet, the chip needs a minimum of 100 µsec to prepare the data)
//Clock the data back in for (i = 8; i != 0; i--) { digitalWrite (SCLK, LOW); digitalWrite (SCLK, HIGH); r |= (digitalRead (SDIO) << (i - 1) ); }
delayMicroseconds(110); //Tailing delay guarantees >100 µsec before next transaction
return r;}
//ADNS2610 dumps a 324-byte array, so this function assumes arr points to a buffer of at least 324 bytes. (A2620: unchanged)void readFrame(byte *arr){ byte *pos; byte *uBound; unsigned long timeout; byte val; xPix = 0; yPix = 0; int pixCount = 0; //Ask for a frame dump writeRegister(regPixelData, 0x2A); // wite anything to pixeldatareg to start at first pixel (A2620)
val = 0; pos = arr; uBound = arr + 325;
timeout = millis() + 1000;
//There are three terminating conditions from the following loop: //1. Receive the start-of-field indicator after reading in some data (Success!) //2. Pos overflows the upper bound of the array (Bad! Might happen if we miss the start-of-field marker for some reason.) //3. The loop runs for more than one second (Really bad! We’re not talking to the chip properly.)
// loop through 324 pixels looking for pixels above 55 light level while ( millis() < timeout && pos < uBound) { val = readRegister(regPixelData); //Only bother with the next bit if the pixel data is valid. if ( !(val & 64) ) { //Serial.println("Invalid data."); continue; } //If we encounter a start-of-field indicator, and the cursor isn’t at the first pixel, //then stop. (‘Cause the last pixel was the end of the frame.) if ( ( val & 128 ) && ( pos != arr) ) { sync = 0; x = 0; y = 0; // Serial.println(); // Serial.println("Start of File"); break; } *pos = val & 63; // binary opperation to obtain pixel light level if (*pos > 55) { // if above 55 then it is something of interest and not background xPix += x; // sum of x coordinates yPix += y; // sum of y coordinates pixCount++; // number of bright pixels // Serial.print("X"); // Serial.print(" "); // Serial.print(*pos); } //Serial.print(" "); // Serial.print(*pos); pos++; x++; if (x > 17) { // data comes in as a 1 dimentional stream 324 bytes long x = 0; // this IF(statment) gives each byte a X ,Y position CCD is 18 x 18 0-17 y++; // // Serial.println("."); } } if (pixCount > 0) { // average x and y coordinates xPix = xPix / pixCount; yPix = yPix / pixCount; } else { // or return -1 if nothing seen xPix = -1; yPix = -1; }/* Serial.println(); Serial.print("X "); Serial.println(xPix); Serial.print("Y "); Serial.println(yPix); delay(500); // delay to see frames */ xD = 0; yD = 0;}/////////////////////////////////////////////////////////////////////////////////////
Hı this is a very good result but I don't undestood this code which of codes first write to Arduino
ReplyDeleteElmir
Please give a explanation for making sensor circuit
ReplyDelete